The main vision of the SMARTsurg project is to enable complex minimally invasive surgical operations by developing a novel robotic platform for assisting the surgeon in such tasks. Advanced features will be developed and integrated into the proposed platform including:
- Wearable surgical system to provide natural usability and high dexterity to allow the undertaking of more complex surgical procedures and to reduce the surgeon’s cognitive load.
- Anthropomorphic multi-fingered surgical instrument controlled by the anthropomorphic wearable system, enabling user-centred design and modifications by means of additive manufacturing.
- Software embedded visual and force augmentation for increased safety and dependability.
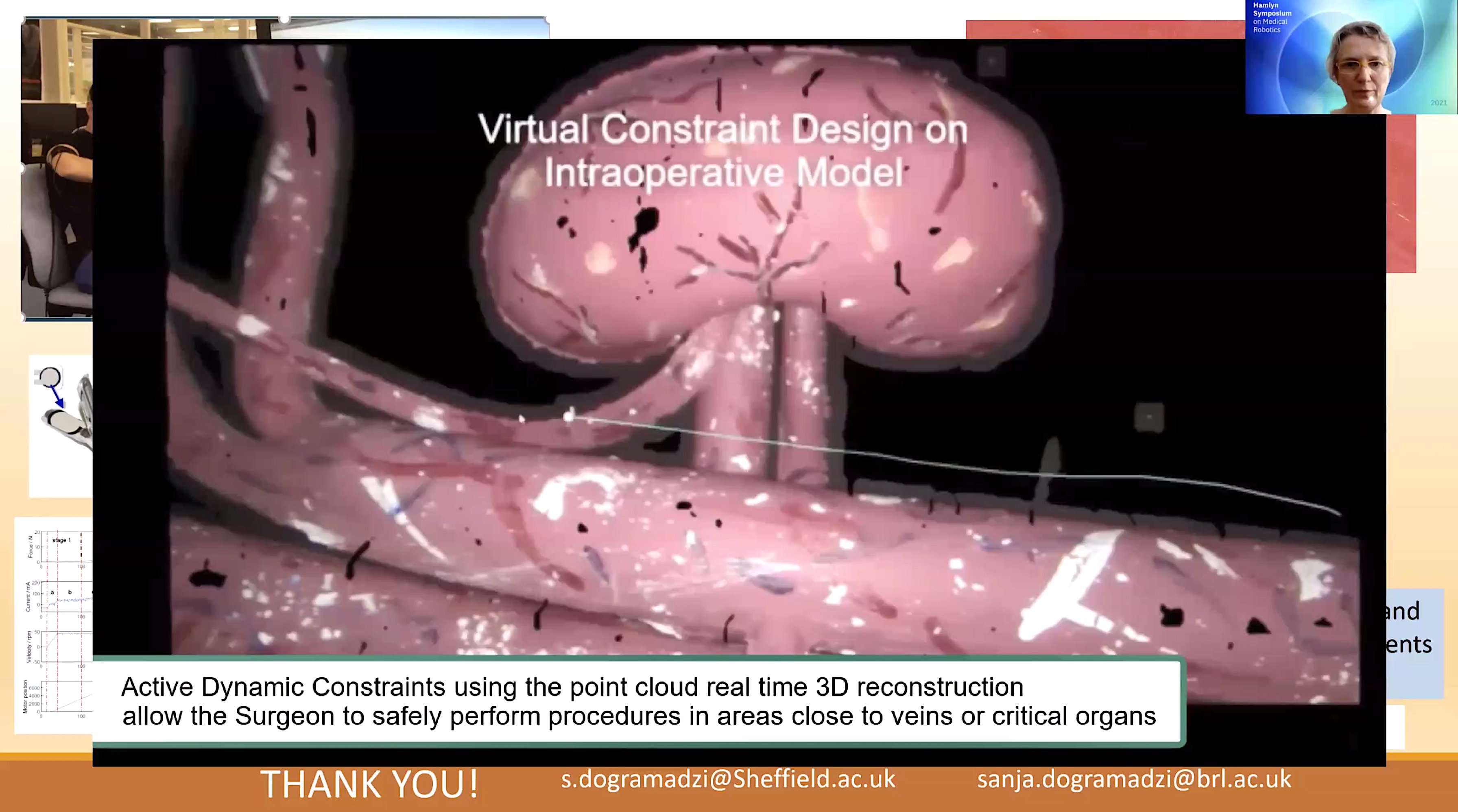
- Functionalities enhancing the system’s cognition abilities and dependability, such as dynamic active constraints construction and enforcement, as well as user intention detection.
The above features will enable the system to adapt to the different particularities of each type of surgical operation that will be considered as clinical use-cases of the proposed project. The anthropomorphic surgical instrument developed during this project will have a universal usability across all use-cases, whereas the adaptation to each use-case will be achieved by modifying the end-effector architecture to accommodate specific grasping and manipulation needs as dictated by different clinical scenarios. A three-phase procedure is proposed which is based on feedback from surgeons following testing in relevant models. This clinical feedback will be captured in redesigning the instrument’s end-effectors or digits. During all phases haptic and visual feedback will be provided in real-time to the surgeon, and augmented reality visualizations will also be available.
The new master-slave system will be built upon the existing commercial platforms:
- Haption Virtuose 6D haptic manipulator as part of the master device
- Industrial 6DOF robotic arm (ABB or similar) for positioning the slave instrument inside the patient.
- Cybernetix CyXpro ® Real-Time 3D software supervision for tele-operated system to interface the Virtuose and hand exoskeleton with the ABB arm and slave instrument
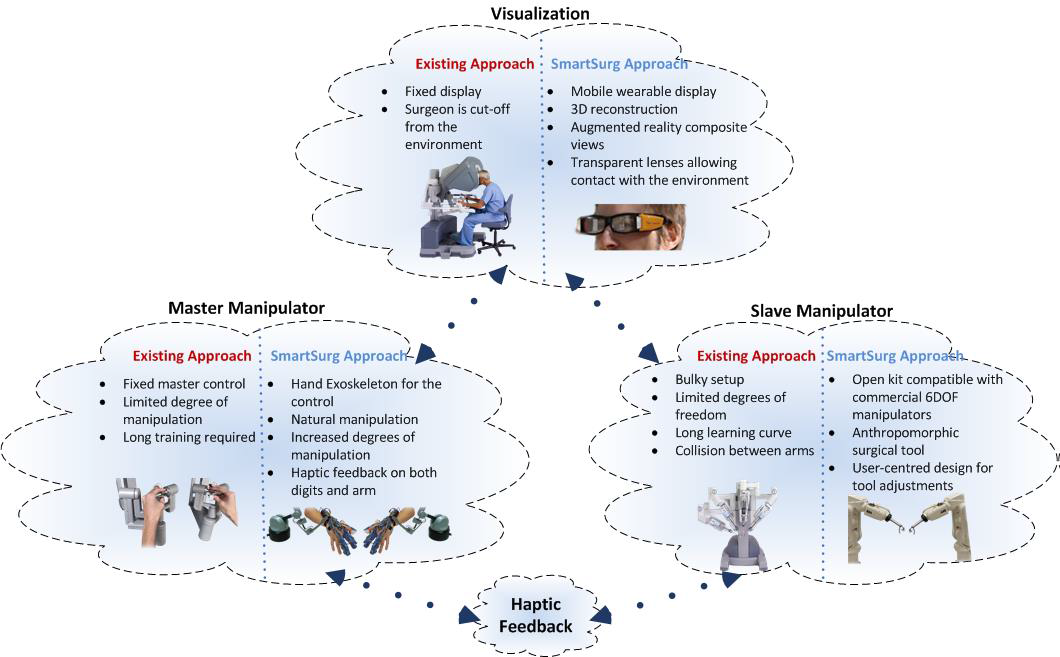
- Suitable interfaces between the Virtuose and hand exoskeleton as well as between the ABB arm and the slave instrument will be designed and manufactured. Planned additions are illustrated in the figure and further analysed below:
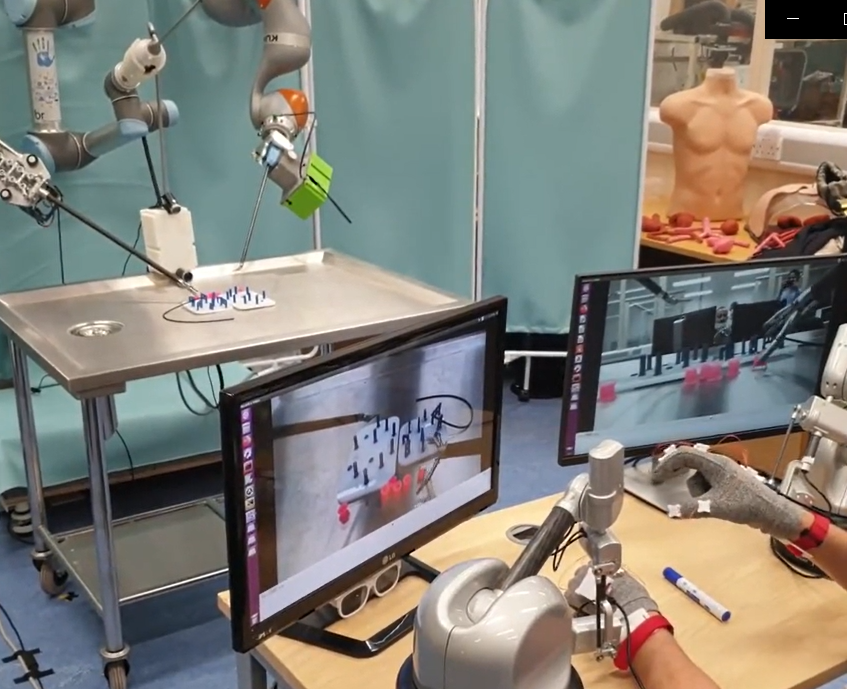
The proposed tele-operated system aims at high dexterity and natural manipulation. This is accomplished through the two subsystems shown in the figure. The master system comprises of the hand exoskeleton (M1) with haptic feedback (supported by CyXpro) which tracks digit and wrist motion (not currently implemented) and is attached to the Virtuose 6D Desktop haptic device (M2) via an easy release attachment. The attachment is particularly important when surgeon performs micro-tasks that cover small workspaces. In this case, the surgeon is only using the exoskeleton as the master as shown in the figure. The slave system includes the anthropomorphic instrument (S1) which is held and positioned in 3D space by a 6 DOF ABB arm (S2). The teleoperation control relates M1 to S1 and M2 to S2.

Sensory Additions:
- 3D Vision system for inspecting the surgical field
- RGBD sensor monitoring the surgeon side
- Sensor-less force detection of tissue grasping
Master Manipulator Additions:
- A hand exoskeleton for better tissue manipulation and grasping and an extended multi-DOF shaft for better dexterity inside the abdomen interfaced with Haption Virtuose 6D, and Cybernetix Real Time 3D supervision software managing the haptic force-feedback between the slave and the master exoskeleton.
- Wearable smart glasses for augmented reality guidance of the surgeon.
Slave Manipulator Additions:
- An anthropomorphic multi-digit surgical instrument with universal usability designed for the diversen considered use-cases integrated with a 6DOF manipulator for gross positioning at the surgical site.
The additions listed above form the core of the SMARTsurg system that is a mixture of innovative technologies advancing the abilities of existing systems (see figure).