Rationale – Current Status and Motivation
Minimally Invasive or key-hole Surgery (MIS) has become an established alternative to the conventional open approaches in a significant number of surgical fields with evidence of effectiveness and patient satisfaction. The global minimally invasive surgery market, which was valued at US$25.03 billion in 2012, will reach a worth of US$50.60 billion by 2019, according to a recent study [1] . MIS has changed the landscape of peri-operative surgical care over the last 3 decades. Teleoperated surgical systems have been increasingly used in MIS procedures over the past ten years. While the case of their use is complex, it is strongly expected that there will be an increasing number of different procedures carried out using telerobotic technology in the coming decade (SPARC, Strategic Research Agenda for Robotics in Europe, 2014-2020 [2] ). This increase is also reflected in the use of service robotics for medical applications (see figure), which corresponds to about 28% of the entire market. Furthermore, a high growth rate for service robotics is expected until 2017 reaching a total amount of $7.4 billion.

The development of robotic surgical platforms (Da Vinci surgical system, Intuitive Medical) has introduced 3D vision and significant improvements in the degrees of movement achieved with surgical instruments within body cavities. This enabled complex extirpative surgery and reconstructive surgery to be performed minimally invasively.
The development of robotic surgical platforms (Da Vinci surgical system, Intuitive Medical) has introduced 3D vision and better ergonomics for the surgeon. In some surgical applications Robot-Assisted (R-A) MIS has shown great promise to outperform traditional laparoscopy or thoracoscopy with evidence of surgical precision, safety and reduced invasiveness. In this endeavour, assisting and enhancing further the surgeon’s performance is of fundamental importance. Further developments are needed to develop more sensitive robotic systems with new teleoperation interfaces to improve their efficacy and to expand their applicability to more complex surgical procedures. To cope with such challenges, the need for developing advanced technologies that will reinforce RAMIS dependability for improved patient safety and cognitive attributes to reduce surgeon’s perceptive load is evident.
SMARTsurg targeted breakthrough
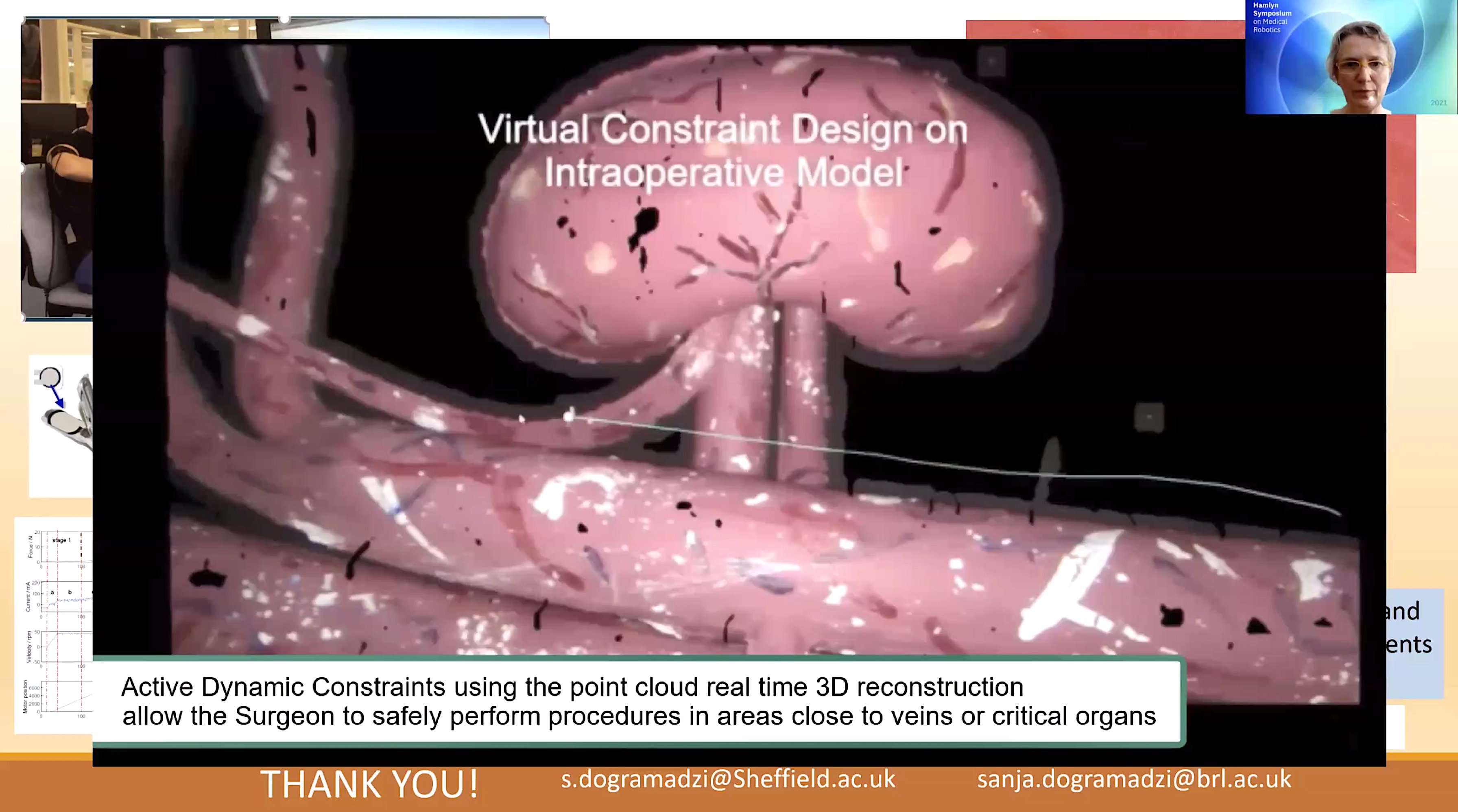
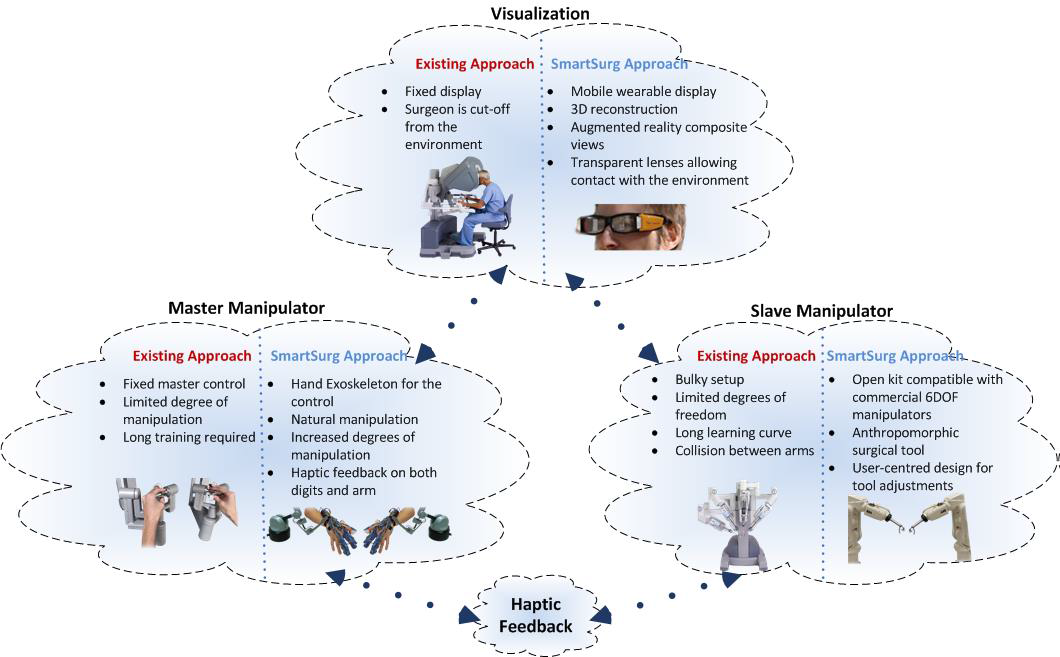
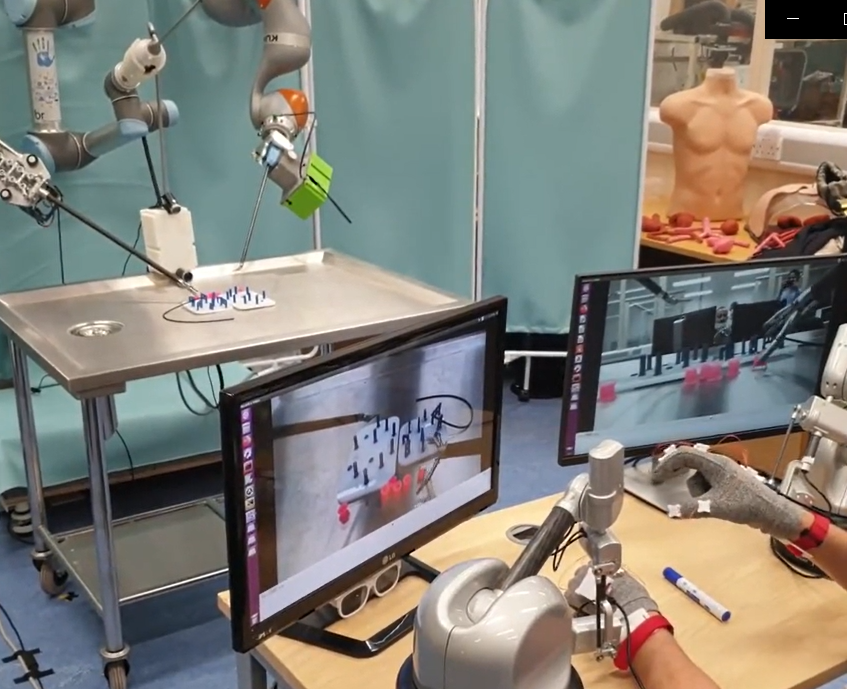
The SMARTsurg project aims to develop an advanced system for performing R-A MIS, in order to reduce the surgeon’s cognitive load related to the system’s operation that will ultimately allow shorter training time, while delivering increased accuracy, safety, reduced MIS procedure time, and expanded applicability. To this end, this project aims to design and develop a wearable interface for a surgical system using a) highly dexterous anthropomorphic surgical instruments b) wearable hand exoskeleton with haptic feedback for controlling the surgical instruments, and c) wearable smart glasses for augmented reality guidance of the surgeon based on realtime 3D reconstruction of the surgical field. High dependability will be achieved by utilising real-time dynamic active constraints to the instruments’ motion, in order to restrict it to the safe regions. SMARTsurg developments will employ a user-centred approach for efficient technology adoption and commercialisation. This will be achieved using short prototyping and testing cycles supported by focused end-user and commercials requirements.