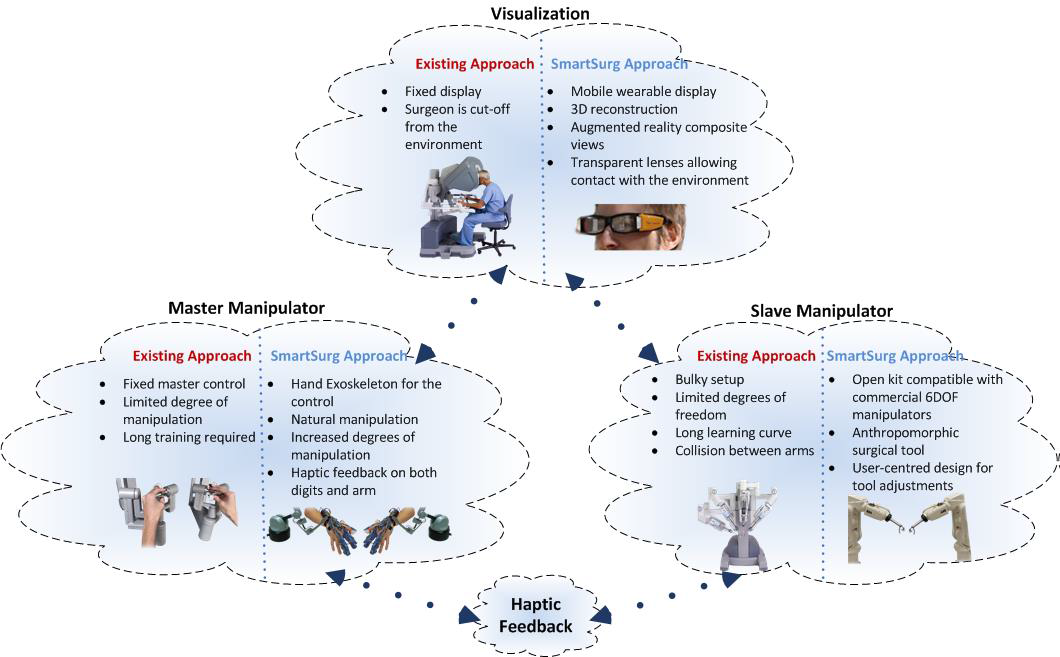
Robot-assisted minimally invasive surgery (RAMIS) offers many advantages when compared to traditional MIS, including improved vision, precision and dexterity. While the popularity of RAMIS is steadily increasing, the potential for improving patient outcomes and penetrating into many procedures is not fully realised, largely because of serious limitations in the current instrumentation, control and feedback to the surgeon. Specifically, restricted access, lack of force feedback, and use of rigid tools in confined spaces filled with organs pose challenges to full adoption. We aim to develop novel technology to overcome barriers to expansion of RAMIS to more procedures, focusing on real-world surgical scenarios of urology, vascular surgery, and soft tissue orthopaedic surgery. A team of highly experienced clinical, academic, and industrial partners will collaborate to develop:
- dexterous anthropomorphic instruments with minimal cognitive demand,
- a range of bespoke end-effectors with embedded surgical tools using additive manufacturing methods for rapid prototyping and testing utilizing a user-centred approach,
- wearable multi-sensory master for tele-operation to optimise perception and action and
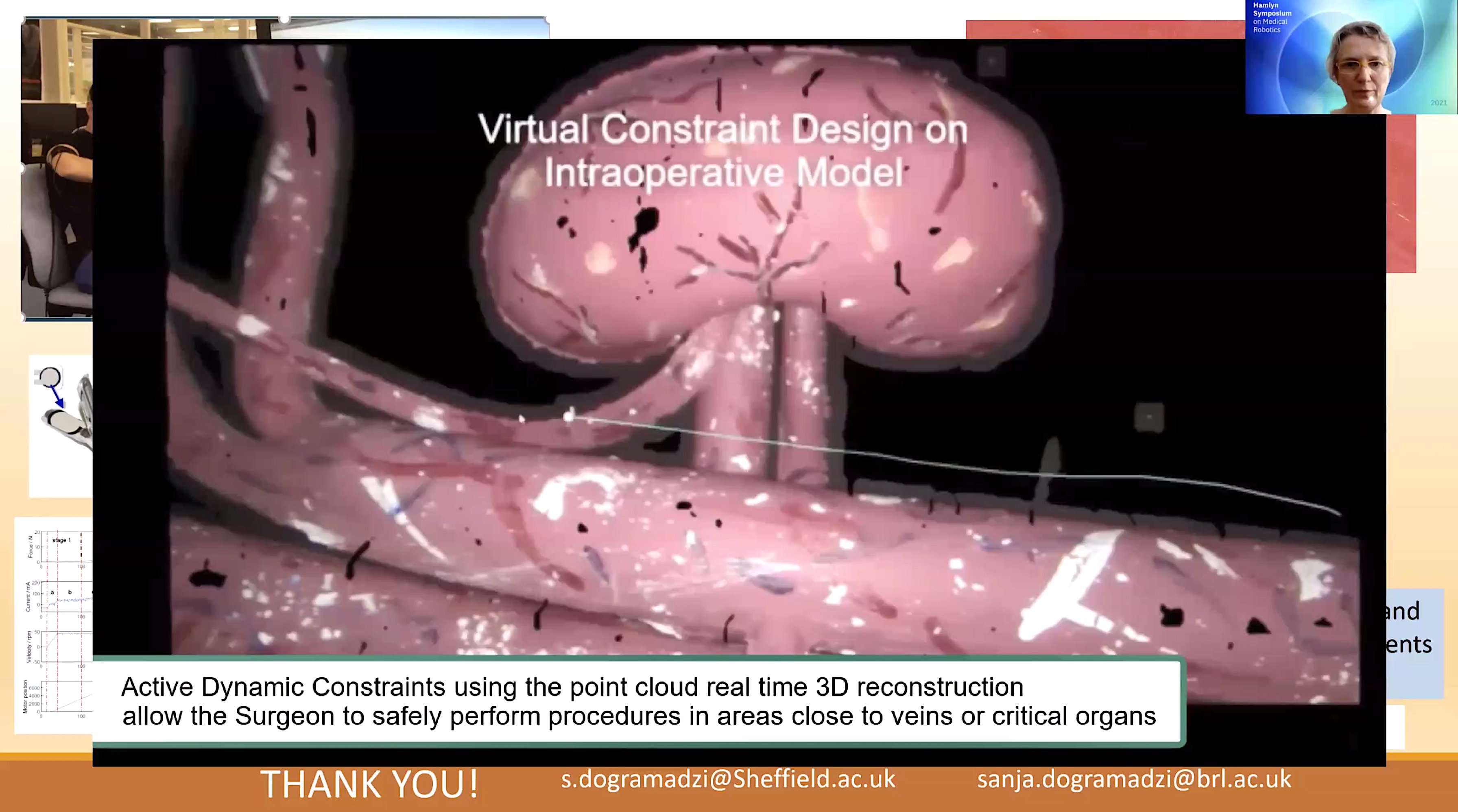
- wearable smart glasses for augmented reality guidance of the surgeon based on real-time 3D reconstruction of the surgical field, utilising dynamic active constraints and restricting the instruments to safe regions.
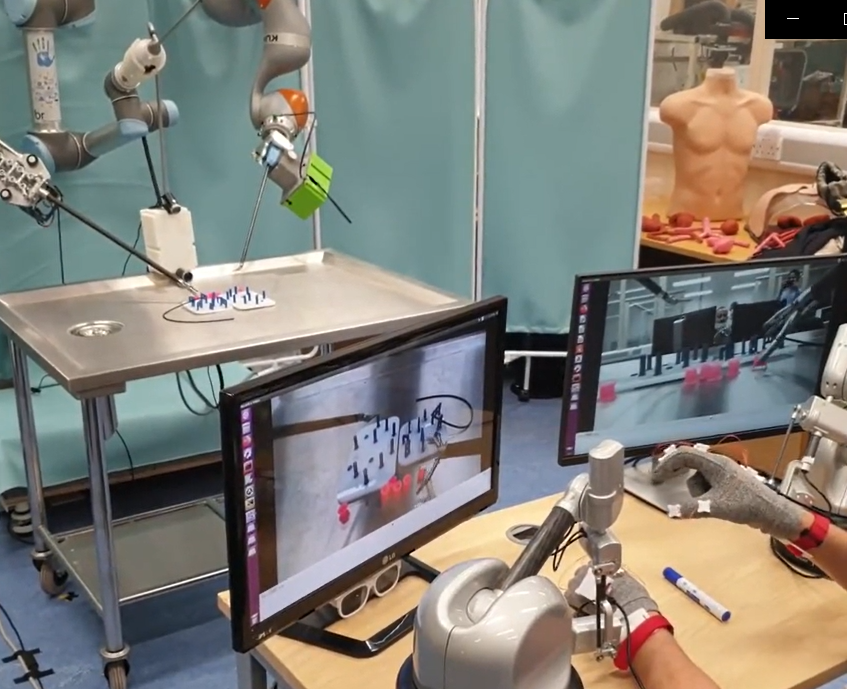
The demonstration platform will be based on commercial robotic manipulators enhanced with the SMARTsurg advanced hardware and software features. Testing will be performed on laboratory phantoms with surgeons to bring the technology closer to exploitation and to validate acceptance by clinicians. The study will benefit patients, surgeons and health providers, by promoting safety and ergonomics as well as reducing costs. Furthermore, there is a potential to improve complex remote handling procedures in other domains beyond RAMIS.
Objectives
The project will develop an advanced system for performing Robot Assisted MIS to reduce the surgeon’s cognitive load related to the system’s operation to shorten training time and deliver accuracy, safety, reduced procedure time and expanded applicability. Objectives: a) dexterous anthropomorphic surgical instruments b) wearable hand exoskeleton with haptic feedback to control the surgical instruments, c) wearable smart glasses for augmented reality and 3D reconstruction of the surgical field.
Expected Impact
This highly integrated, multi-disciplinary project will have a considerable impact in the chosen medical domain and beyond, into the many areas that can benefit from tele-operation, haptic feedback, mechatronic design and user centred control. We are:
- Addressing healthcare issues with a widespread applicability and high cost
- Improving patient outcomes through a much wider offer of MIS
- Reducing surgeons’ effort by improving ergonomics and information flow
- Proposing a cost-effective system built on the commercial 6DOF robotic manipulators.