Smart robotic assistant for minimally invasive surgery: the SMARTsurg project experience - Special Session @ MEDICON 2019
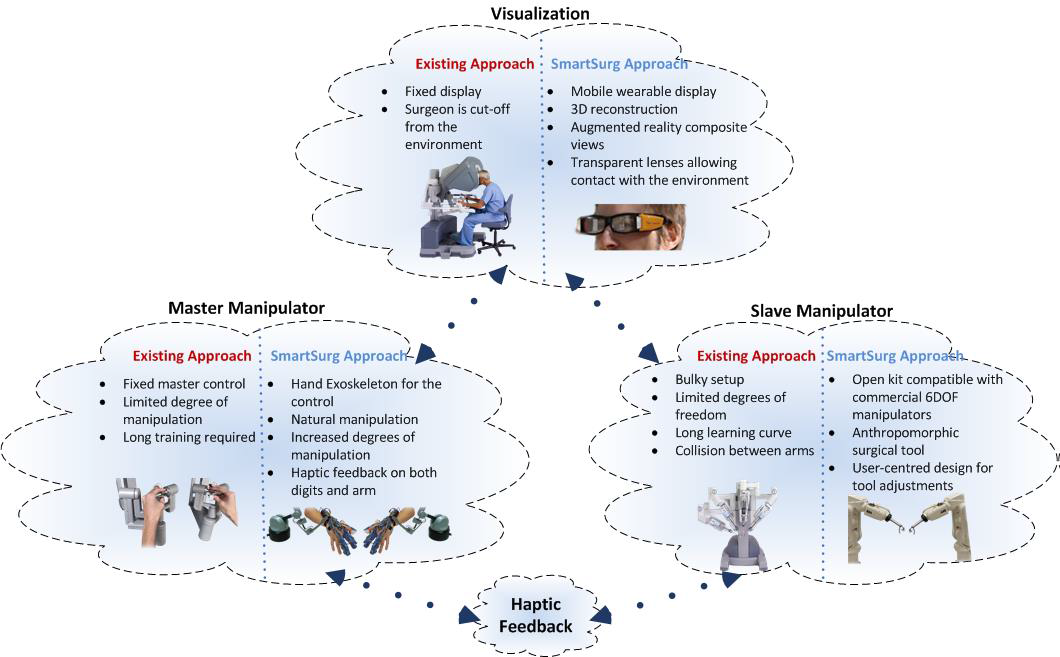
The main vision of the SMARTsurg project is to enable complex minimally invasive surgical operations by developing a novel robotic platform for assisting the surgeon in such tasks, to reduce the surgeon’s cognitive load related to the system’s operation, to shorten training time and deliver accuracy, safety, reduce procedure time and expanded applicability. The chosen application scenarios are:
- Orthopedic surgery
- Urology
- Cardiac surgery
Call for contributions:
We welcome contributions for poster presentation or demonstration. Demonstrations can be videos, devices, sensors, or robots. Contributions should be submitted in the form of an extended abstract or short paper, and specify the type of contribution (poster or demo). Abstract for demos should include a description of the type of demo, content, duration, requirements in terms of power supply, space, desks, TV stands, etc.
All selected contributions will be presented in a spotlight session (3 minutes), during the interactive session at coffee break.
Please note that the abstract of selected contributions will be posted on the workshop website.
Submission information
Submission format: Extended abstract in PDF format, using IEEE template (1 or 2 pages)
Submission: By email using the following address: info [AT] smartsurg-project.eu (use @ instead of [AT])
Please use “[SMARTSURG2019] Poster/Demo contribution – Name of first author” for the title of your email, with the appropriate contribution type (poster or demo).
Important dates
- Submission deadline: August 15, 2019
- Notification of acceptance: August 30, 2019
- Workshop: between 26-28 Sept, 2019
Have a question?
Email the organizers at: info [AT] smartsurg-project.eu (use @ instead of [AT])
Workshop program:
- Towards Finger Motion Tracking and Analyses for Cardiac Surgery
- Augmented Reality Toolkit for a smart Robot-Assisted MIS platform
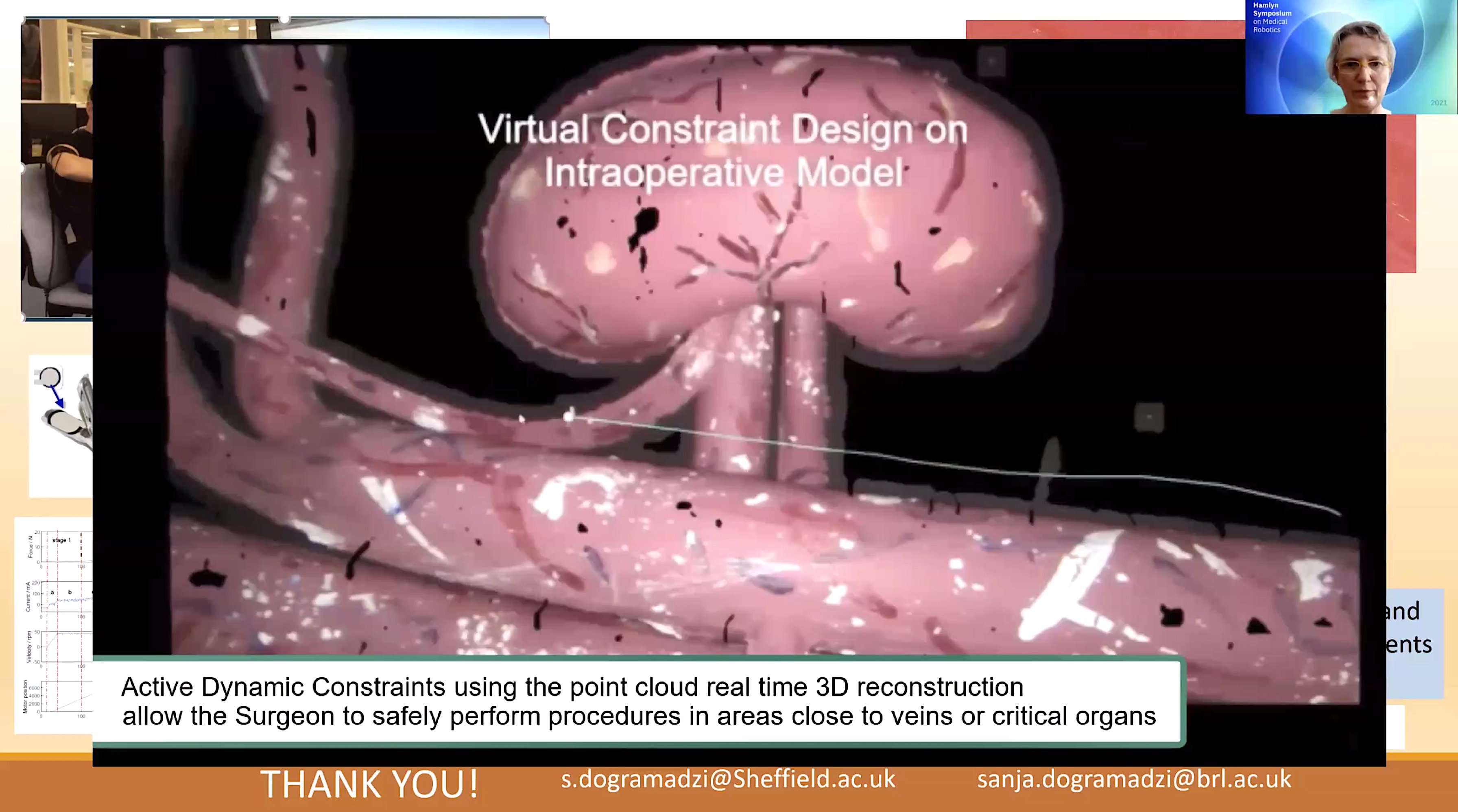
- Manipulation of a whole surgical tool within safe regions utilizing barrier artificial potentials
- Augmented and Virtual Reality in Minimally Invasive Surgery, state of the art and future prospects
6 selected posters pitch (18 minutes)
15 minutes Break
- Surgeon Training with Haptic Devices for Computer and Robot Assisted Surgery: An Experimental Study
- Toward a neural-symbolic framework for automated workflow analysis in surgery
- Evaluation of force feedback for palpation and application of active constraints on a teleoperated system
- Control of a da Vinci EndoWrist surgical instrument using a novel master controller
- A Knowledge-based Graphical Interface for Modeling Surgical Workflows in Robot-Assisted Minimally Invasive Surgery
Check MEDICOM 2019 special sessions from here.