In order for SMARTsurg to successfully realize its vision several prerequisites are set in the form of major Scientific and Technological Objectives throughout the project duration. These are summarized as follows:
Objective 1: To develop a dexterous, adaptable anthropomorphic surgical instrument
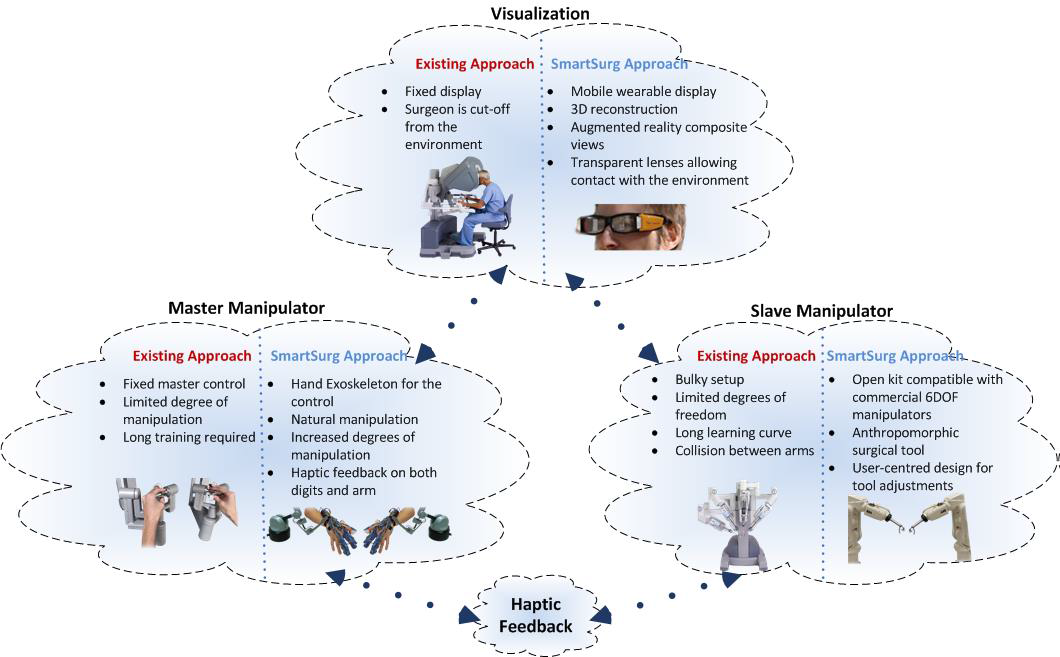
The current state of robotic surgery still has its restrictions, and a unique understanding of these allows us to appreciate the huge potential advantages of the present proposal. All body cavities have constraints from their surrounding skeletal borders. The present surgical instruments are often limited by fixed structures such as the bony pelvis for operations on the prostate or bladder and the rib cage for renal procedures. This translates into greater degrees of complexity, prolonged operating times and surgeon fatigue. Studies have shown that surgeons are not satisfied with the level of dexterity, sensing and ergonomics of the current instruments available for traditional laparoscopy or R-A MIS. The instruments’ shaft and the end-effector have limited number of degrees of freedom (DOF), while the manipulation of the instruments is not intuitive and requires extensive training. Relevant to this, key focuses of current medical robotics research include ergonomics and safety related to the introduction and manipulation of the surgical instruments inside the patient. By reconsidering the instruments’ design, these issues can be addressed, making RAMIS applicable to surgical procedures that require advanced dexterity inside the human body. Natural interfaces that do not impose high cognitive load to the surgeon to interact with the remote surgical environment are going to be developed in this project in the form of dexterous anthropomorphic (handlike) surgical instruments. The instruments will also have an additional shaft DOF (wrist), to give easy access as well as more natural and efficient manipulation of organs and tissue. To reach this objective, a range of different multi-fingered end-effectors with embedded surgical tools (forceps, scalpels, scissors, etc.) will be designed. The multi-fingered architecture of this type of the slave emulates the surgeon’s digits and wrist movements to facilitate a natural tele-operation interface. Additive manufacturing methods will be employed to rapid prototype and test different bespoke end-effectors utilizing an iterative user (surgeon) centred design for the cases considered in Objective 5. For accurate control of the robotic instruments, the highly dexterous motion of the surgeon’s hand must be precisely detected. For anthropomorphic-based surgical end-effectors, the most intuitive interface for surgeons to use is one that fits their hands and allows control of the instruments as if they were simply an extension to their own body. In order to allow the surgeon to use their hands in a natural way while obtaining high resolution data of the joint angles of the surgeon’s digits, an ergonomic hand exoskeleton with motion capture precision and haptic feedback will be developed as a master device. The hand exoskeleton will be integrated with a commercial haptic arm to create a wearable surgical master that controls directly the slave instrument interfaced with a robot arm that facilitates gross positioning of the slave inside the patient’s body. The enhanced dexterity of this teleoperation architecture will ultimately reduce the size and clashing of the robots arms over the patient (a current issue of the Da Vinci surgical robotic system). A clip-on concept will be investigated for fast change of the anthropomorphic surgical instruments. In conjunction to the use of open source software modules for integrating the master-slave system, high adaptability of the system to a large variety of commercial 6 DOF robotic manipulators is expected. Thus, the envisioned system could be deployed with little restrictions to the selection of the actual robotic platform.
Objective 2: To develop a framework for providing haptic feedback from the surgical instrument to the surgeon
To reach this objective, novel methods for enabling feedback on user’s actions by adding haptic features to the employed master manipulator (commercial haptic arm integrated with the hand exoskeleton) and pressure sensing on the slave side (surgical end-effector) will be investigated. The hand exoskeleton’s haptic features will include force-feedback from the end-effector to enable remote palpation of the tissue in contact with the end-effector’s digits while the haptic arm will provide the sensation of a multi-DOF arm that holds and positions the anthropomorphic instrument. Force sensing on the slave side will be utilised by sensor-less and pseudo sensor-less strategies based on the motor current sensing. This method does not require additional hardware which could be difficult to integrate to the miniature surgical end-effectors. Moreover, CyXpro ®, as a commercially available technology building block for Real-Time 3D software supervision for tele-operated systems, will provide a platform for development and improvement to enable highly effective force feedback managing all sensory data.
Objective 3: To develop strategies for dynamic active constraints construction and their guaranteed satisfaction
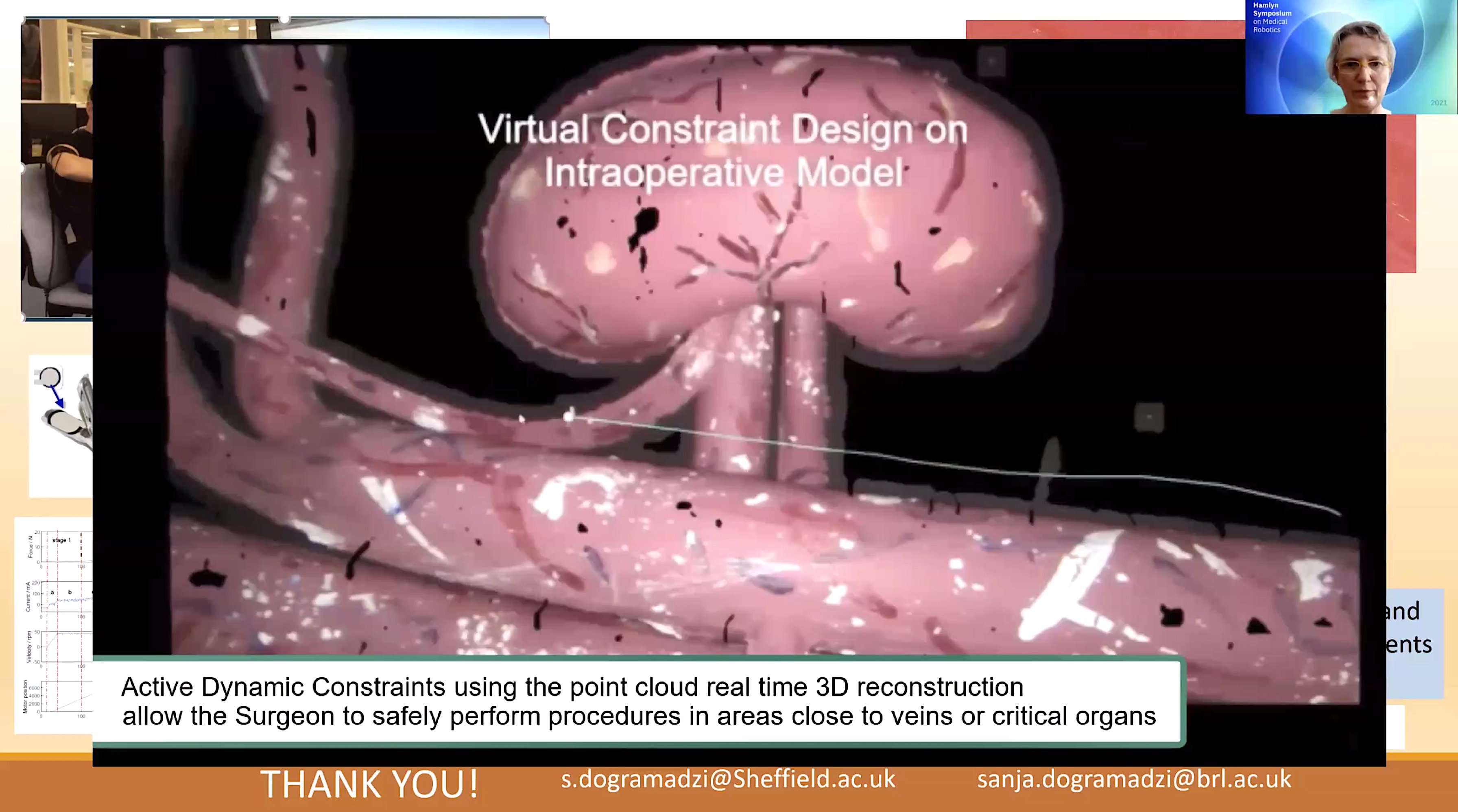
To establish dependability, it is mandatory to research and develop novel, high-level robot control algorithms (active constraints controller) to assist a human user (surgeon) in R-A MIS tasks. The active constraints controller will monitor the robotic manipulator and the slave instrument with respect to the environment and task, and will on-the-fly determine the constraints, evaluate them and finally will anisotropically regulate the robot’s motion to either guide the surgeon along a task-specific pathway or confine the surgeon generated motion within a safe region. The use of active constraints in surgery on static geometries has been successful in various scenarios and it has been utilised in several commercial systems. However, movement and deformation in the surgical environment due to respiration, instrument contact, and pulsation, call for a dynamic approach to the active constraints enforcement.
Objective 4: To develop advanced cognition and perception abilities to achieve the real-time and on-the-fly reconstruction of the operation area
This objective involves the development of an advanced image acquisition and processing system presenting cognition abilities, achieving real-time, on-the-fly, , three-dimensional (3D) reconstruction and visualization of the operation area. Real-time visualization will result to decreased operation times, which can lead to better patient outcomes as well as improved experience for the surgeon. Moreover, on-the-fly three-dimensional (3D) reconstruction of the surgical field can improve accuracy, reinforcing one of the main advantages of using robotic systems for MIS. Achieving real-time performance is also necessary for providing the required feedback for the construction of dynamic active constraints of Objective 3. State-of-the-art (SoA) imaging and 3D reconstruction techniques employed in MIS will be investigated and extended, such as Time of Flight sensing, and close-range photometric stereo, whereas a knowledge base will be created for developing the system’s cognition abilities.
Objective 5: To validate SMARTsurg project results in realistic scenarios involving procedures on different surgical domains
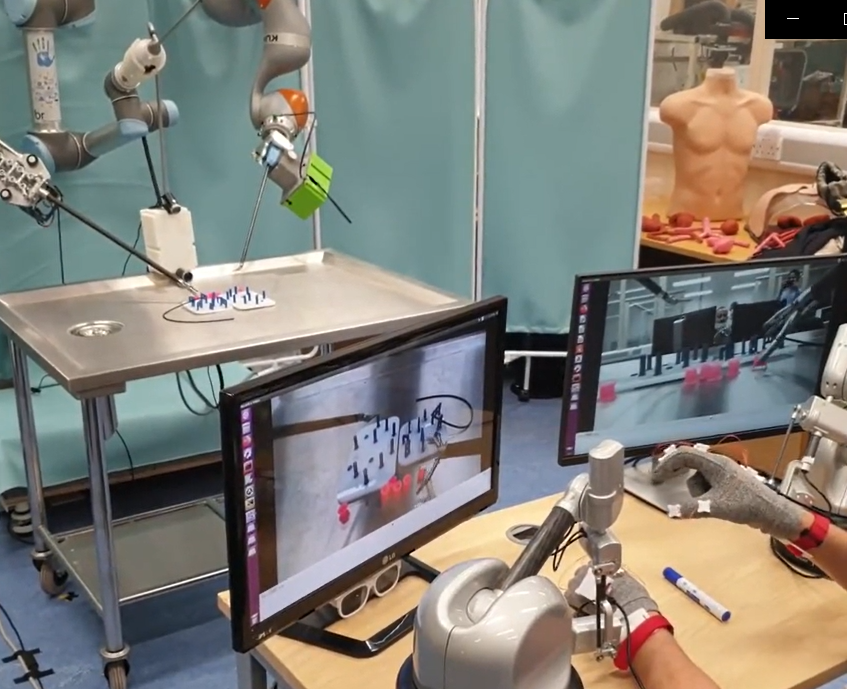
Targeted advanced functionalities will be demonstrated in real-world surgical scenarios including urology, vascular surgery, and soft tissue orthopaedic surgery, which commonly employ MIS approaches. The demonstration platform will be based on commercial robotic manipulators that will be enhanced with the SMARTsurg hardware and software additions. These practical demonstrations on relevant models will show the feasibility/usability of the proposed system in assisting the surgeon in performing the aforementioned surgical tasks while, during the developmental phase, critical feedback by the surgeons will be provided in order to refine and improve the design. Considered use-cases will include resection of kidneys tumours, cardio-vascular surgery, and treatment of the meniscal tear injuries in the knee.